
Joystick Controlled Flexibot by Using SKXBee
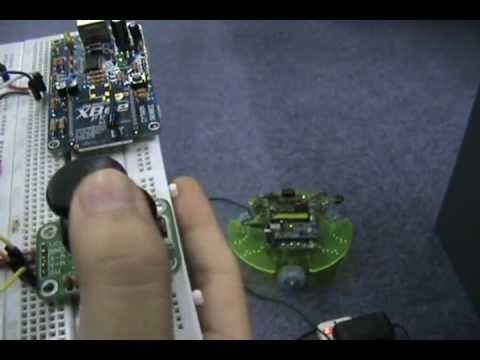
This project main purpose is used a joystick to control the direction moving of Three Transwheel Flexibot with wireless communicate method. In this project, we have used SK40C (40 pins PIC Starter Kit), PIC16F877A, 2×16 LCD, small Joystick, two SKXBEE Pro, Flexibot (Cytron DIY project PR19), breadboard, 12V LIPO battery or 12VDc adapter and some wires.

The joystick can control 4 moving direction which is forward, backward, right and left. However, if pressing the joystick center button, the Flexibot will rotating with clockwise direction. 2×16 LCD is used for display the joystick direction and the ADC value (0000-1023) of joystick board.

For example, when the joystick to forward direction, the Flexibot transwhee will moving to front after SKXBee Pro 2 receive data from SKXBee Pro 1. The Flexibot LCD also will display the message as figure below:

Demo Video:
Attachments:
Related Posts:





![]() Published by: pheysia
Published by: pheysia
from your coding given. the zigbee initialize only in remote control? my question is we need to initialize the xbee only in one radio? our both?
Both Xbee need to be configure to pair up.